
My research interest includes embodied robotics and AIGC in autonomous driving. I have published papers at the top international AI conferences with total 
🔥 News
- 2025.06: 🎉 Dark-ISP is accepted by ICCV 2025.
- 2025.06: 🎉 FusionMap is accepted by IEEE Transactions on Artificial Intelligence.
- 2025.06: 🎉 EC-SLAM is accepted by Pattern Recognition.
- 2025.06: 🎉 CasPoinTr is accepted by IROS 2025.
📝 Publications
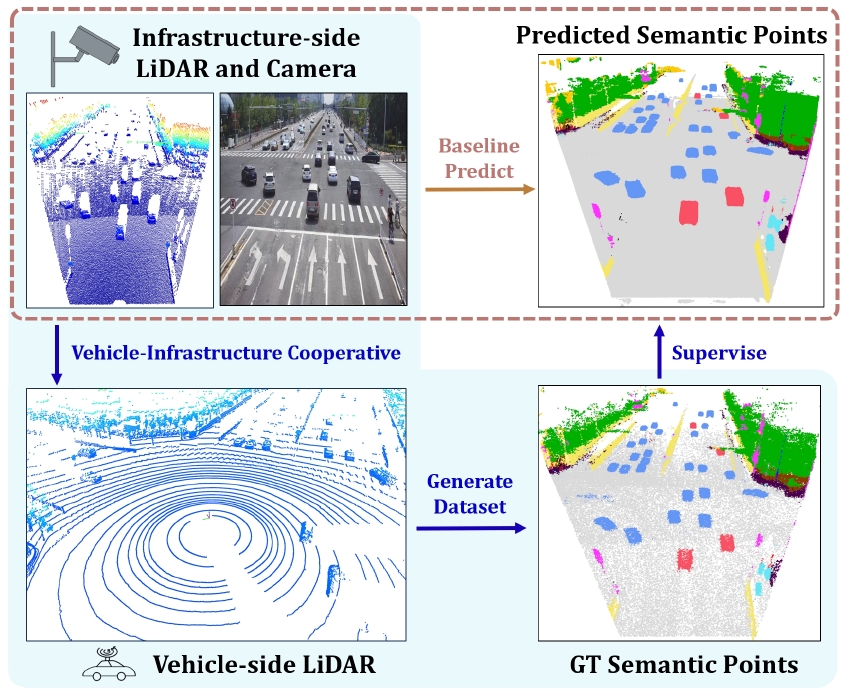
PointSSC: A Cooperative Vehicle-Infrastructure Point Cloud Benchmark for Semantic Scene Completion
Yuxiang Yan, Boda Liu, Jianfei Ai, Qinbu Li, Ru Wan, Jian Pu


- Most existing Semantic Scene Completion (SSC) models focus on volumetric representations, which are memory-inefficient for large outdoor spaces. We introduce PointSSC, the first cooperative vehicle-infrastructure point cloud benchmark for SSC. These scenes exhibit long-range perception and minimal occlusion. We develop an automated annotation pipeline and propose a LiDAR-based baseline model. PointSSC provides a challenging testbed to drive advances in semantic point cloud completion for real-world navigation.
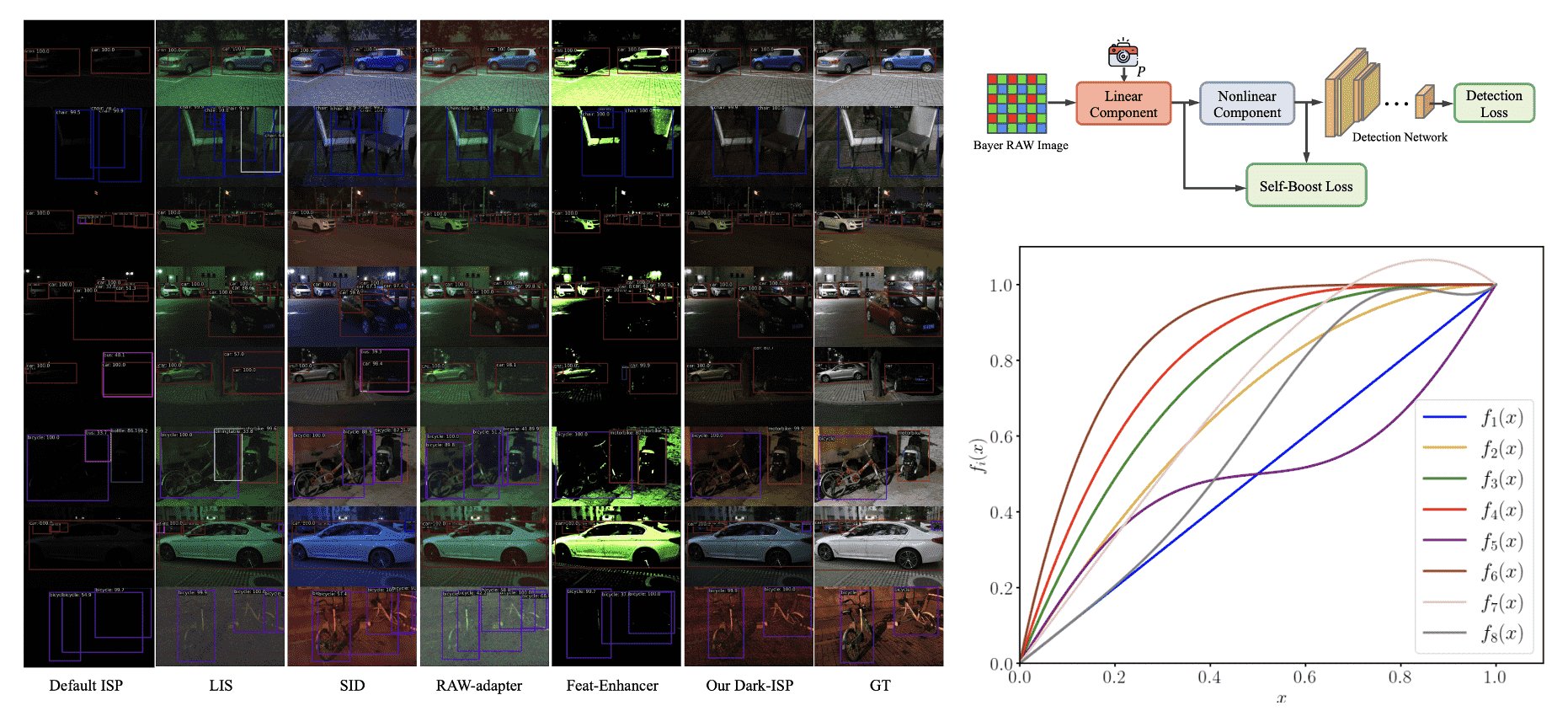
Dark-ISP: Enhancing RAW Image Processing for Low-Light Object Detection
Guo jiasheng*, Xin Gao*, Yuxiang Yan, Guanghao Li, Jian Pu
- Dark-ISP is a lightweight and self-adaptive Image Signal Processing (ISP) plugin designed to improve low-light object detection. Unlike previous methods that either use RAW-RGB images with information loss or complex frameworks, Dark-ISP processes Bayer RAW images directly in dark environments. Its key innovations include deconstructing conventional ISP pipelines into linear and nonlinear sub-modules optimized for task-driven losses, and a self-boosting strategy that enhances cooperation between sub-modules.
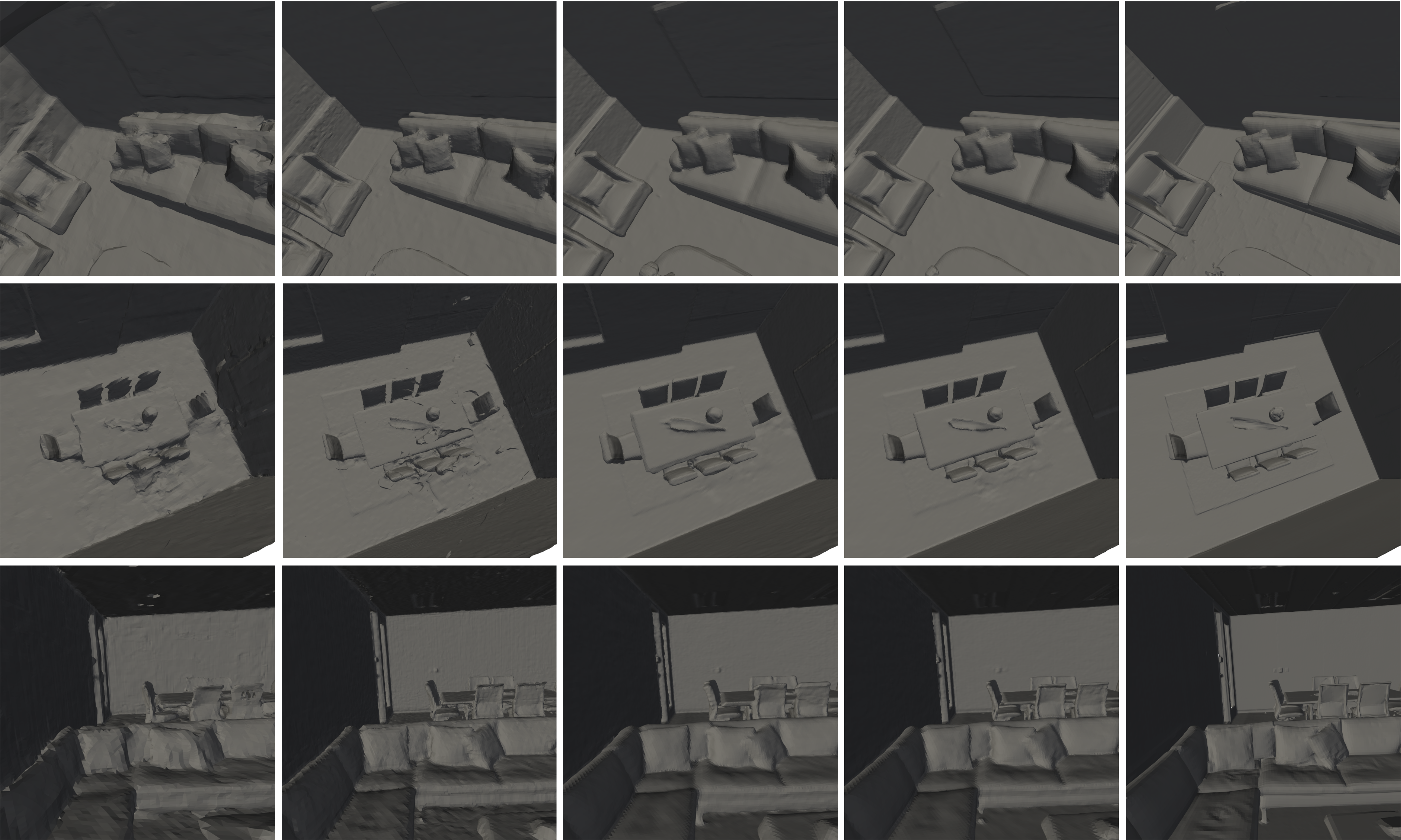
Constrained Gaussian Splatting via Implicit TSDF Hash Grid for Dense RGB-D SLAM
Guanghao Li, Qi Chen, Sijia Hu, Yuxiang Yan, Jian Pu
- FusionMap is an advanced SLAM system that combines explicit 3DGS and implicit NeRF representations to improve surface reconstruction accuracy. By addressing the limitations of traditional 3DGS, FusionMap achieves up to 30 times faster processing and a 38% accuracy boost over conventional methods. This innovation sets new standards for real-time 3D mapping and localization, enabling next-generation applications in virtual environments, autonomous navigation, and dynamic scene reconstruction.
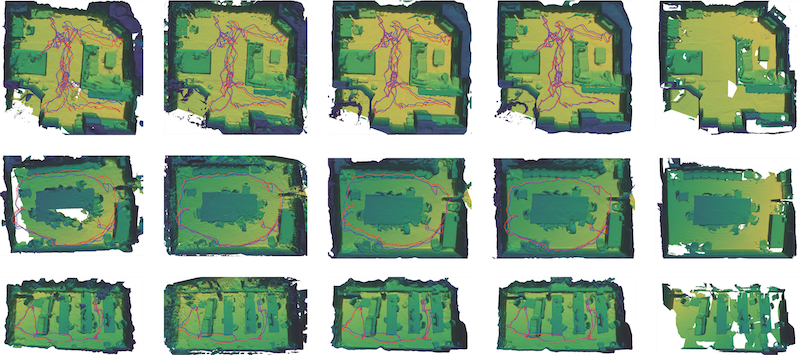
Guanghao Li*, Qi Chen*, Yuxiang Yan, Jian Pu


- EC-SLAM is a real-time dense RGB-D SLAM system that leverages Neural Radiance Fields (NeRF) for enhanced pose optimization, using sparse parametric encodings, TSDF, and a globally constrained Bundle Adjustment strategy to improve tracking accuracy and reconstruction performance in real-time.
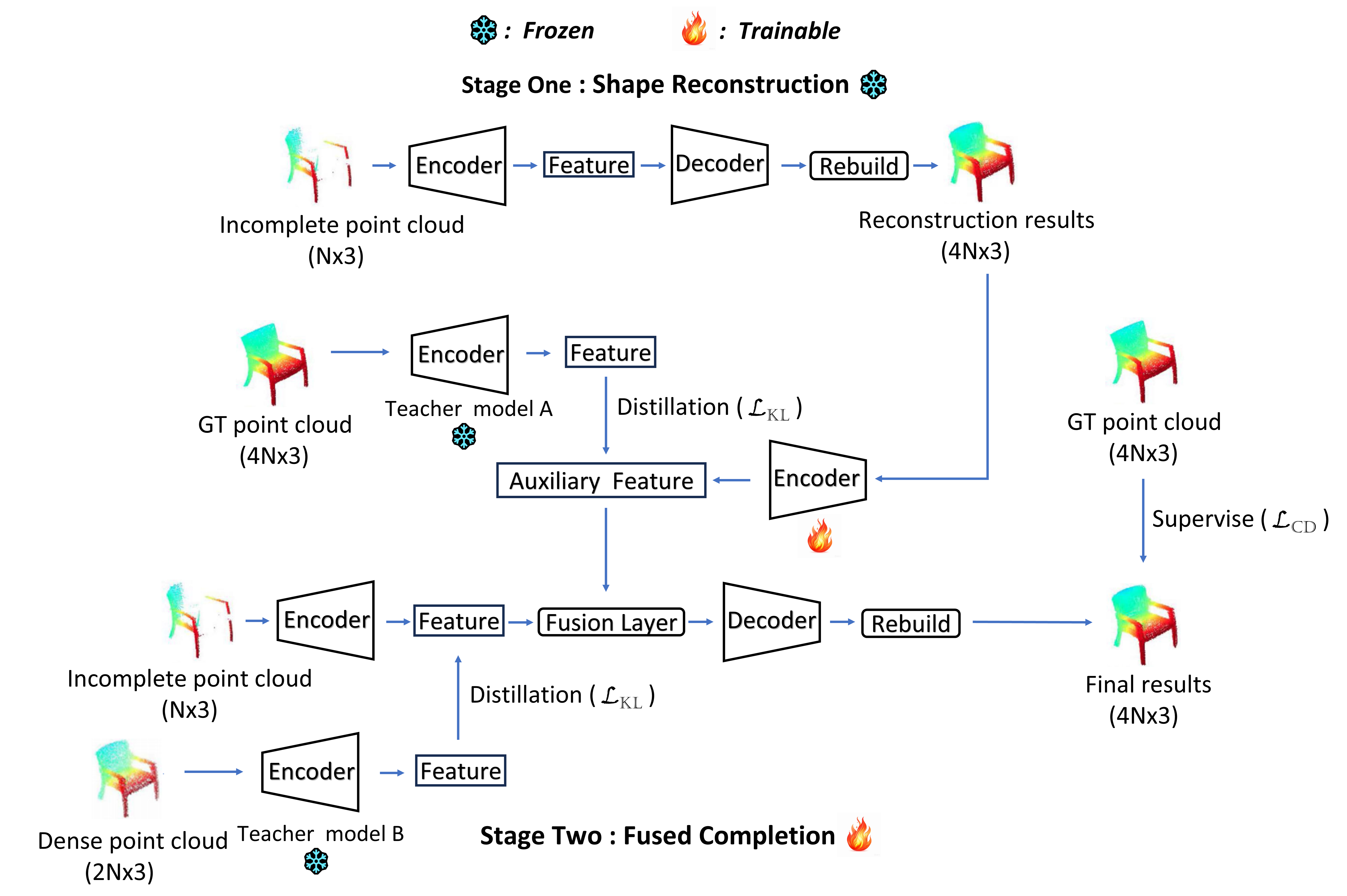
CasPoinTr: Point Cloud Completion with Cascaded Networks and Knowledge Distillation
Yifan Yang, Yuxiang Yan, Boda Liu, Jian Pu
- CasPoinTr completes highly incomplete real-world point clouds in two stages. First, Shape Reconstruction Module generates auxiliary information to guide missing-region prediction. Then, Fused Completion Module refines the output using knowledge distilled from a teacher model trained on dense clouds, improving global shape estimation and local detail recovery.
🎖 Honors and Awards
- 2025.05 Fudan University First Class Scholarship ($1400)
- 2022.06 Outstanding Graduate of Shanghai
📖 Educations
- 2022.09 - now, Ph.D., Fudan University, China.
- 2018.09 -2022.06, Bachelor of Science, East China University of Science and Technology.
👨💼 Academic Service
- Journal Reviewer: RA-L, TIV, Cognitive Neurodynamics
- Conference Reviewer: ICCV2025, ICME2025
- Teaching assistant: Embodied Intelligence, Introduction to Autonomous Driving